Tick Rover Gen II
by Tommy Kendzia, Ben Absher, and Chris Baber '12,
by Tommy Kendzia, Ben Absher, and Chris Baber '12,
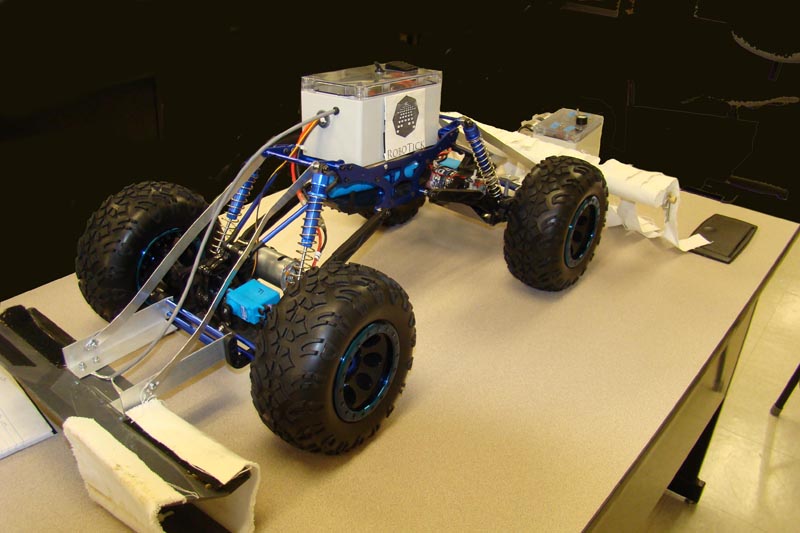
In 2012 Tommy Kendzia and Washington and Lee student Ben Absher constructed an improved version of the first generation tick rover originally tested in 2006. The 2006 robot had shown proof of concept of using a robot to reduce tick populations; this second generation robot was designed to be rugged enough to withstand independent laboratory testing for two weeks at Fordham University in New York. The robot was demonstrated at the Virginia Academy of Science and the MARCUS undergraduate research conference at Sweet Briar. Although the scientific tests were not able to be carried out because of uncooperative weather conditions, the scientists at Fordham did conduct two weeks worth of engineering field tests with it, during which time the robot performed flawlessly. We decided to incorporate some of the suggestions generated during the two week field testing into a third generation of the robot, to be tested at Old Dominion University in the summer of 2013. The project is advised by James Squire and David Livingston of VMI's Department of Electrical Engineering, Jay Sullivan of VMI's Department of Mechanical Engineering, and Daniel Sonenshine of Old Dominion University's Department of Biology.